ANN ARBOR, MI
A new paper published in the International Journal of Robotics Research (IJRR) and featured on the cover, introduces a novel logic for formally evaluating the requirements of perception systems used in automated vehicles.
The Challenge of Evaluating Perception Systems
The safety of automated vehicles (AVs) relies heavily on robust and accurate perception systems. These systems, typically composed of sensors like cameras and LiDAR, process raw environmental data and provide the AV with an understanding of its surroundings. However, conventional methods for evaluating perception systems are often inadequate. Current techniques primarily focus on frame-by-frame performance, which fails to capture the dynamic, real-world scenarios that AVs encounter.
Introducing Spatio-Temporal Perception Logic (STPL)
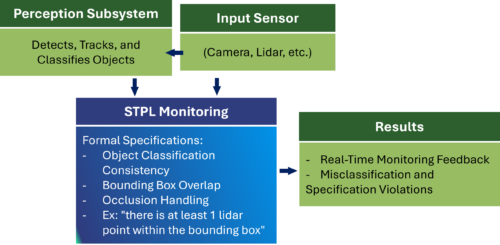
To address the shortcomings of existing approaches, the paper presents STPL, a logic designed explicitly for reasoning about the spatial and temporal aspects of perception system performance. STPL enables the formalization of complex requirements such as:
- Object Persistence: Specifying that an object, once detected, should persist for a certain duration or until specific conditions are met.
- Classification Consistency: Defining rules for how an object’s classification (e.g., car, pedestrian, cyclist) should evolve over time, ensuring consistent and reliable labeling.
- Spatial Relationships: Expressing constraints on the relative positions, movements, and interactions of objects within a scene, including requirements related to occlusion and collision avoidance.
Benefits of Formal Specifications
The use of STPL for formalizing perception system requirements offers several advantages:
- Automated Analysis: It facilitates the development of automated testing and verification frameworks that can systematically assess perception system performance against well-defined specifications.
- Scenario Generation: Formal requirements expressed in STPL can be leveraged for generating complex and realistic scenarios for simulation and testing, leading to more comprehensive system validation.
- Improved Communication: Provides a precise and unambiguous language for defining expectations for perception systems.
A Look Towards the Future: This research marks a significant step towards a more rigorous and systematic approach for the development and evaluation of robust and trustworthy perception systems for AVs. By addressing a critical gap in the current landscape of AV perception system assessment, STPL has the potential to significantly impact the safety and reliability of future autonomous driving technologies.
Please visit our publication in The International Journal of Robotics Research
For a GPT generated podcast explaining the importance of the work and its implications listen to:
